Optimal control Theory is an exciting research area where new theoretical approaches and application problems both come into play. In such a scenario, mathematicians and engineers often work on the same problems using parallel languages and methodologies. Highly influential academic researchers and experts from industries and agencies will gather at the New Trends and Challenges in Optimization Theory Applied to Space Engineering conference to establish a bridge among their respective groups. The topics of the conference panels have been selected to include the most advanced areas of interest for Space applications. In line with the Gran Sasso Tech Foundation’s mission, we will promote interdisciplinary dialogue among sciences and encourage different experts to collaborate towards identifying new problems and generating new solutions. Covering a wide range of Space-related topics and challenges, this conference aims to lay the foundation for a long-lasting collaboration among different groups of experts.
INFO and Registration email: otseconference@gransassotech.org
PROGRAM
December 13, 2023
| 10:00 | Registration | |
| 10:30 | Coffee break | |
| 11:00 – 12:20 | Welcome from InstitutionsFernando Ferroni, President, Gran Sasso TechMario Cosmo, Director of Science and Research, Italian Space Agency (ASI) Dante Galli, Space Rider Programme Manager, European Space Agency (ESA) Massimo Claudio Comparini, Chief Executive Office, Thales Alenia Space Italia Paola Inverardi, Rector, Gran Sasso Science Institute Elena Grifoni Winters, Capo Ufficio Politiche Spaziali e Aerospaziali, Presidenza del Consiglio dei Ministri | |
| 12:20 – 12:30 | Conference opening remarksLeonardo Mazzini, Chief Technical Officer, Thales Alenia Space Italia | |
| 12:30 | Lunch |
Topic 1: Manifold dynamics, trajectory design, and related control aspects
| 14:00 – 14:30 | Panel coordinator introductionAlessandra Celletti – Chair of Mathematical Physics, Department of Mathematics, Università di Roma Tor Vergata | |
| 14:30 – 15:00 | Invariant manifolds of invariant tori: effective computation and applicationsAngel Jorba – Professor of department of Mathematics and Informatics, University of Barcelona | |
| 15:00 – 15:30 | On the impact of mission constraints on station-keeping at L1 and L2. Libration Point Orbits using Floquet modesAriadna Farres – Research fellow at the Flight Dynamics and Mission Design group, NASA Goddard Space Flight Center | |
| 15:30 – 16:00 | Bang-Bang: Don’t Shoot the PMP PlayerLorenzo Casalino – Professor of Department of Mechanical and Aerospace Engineering, Politecnico di Torino | |
| 16:00 – 16:30 | Challenges of Rendezvous and Optimal Orbital Phasing in Cislunar EnvironmentsSpencer Boone – Post – doctoral researcher, ISAE-SUPAERO, Toulouse | |
| 16:30 – 17:00 | Designing Fuel-efficient Low-thrust Trajectories in Multi-body Dynamical RegimesRichard Epenoy – Research engineer in orbital mechanics, CNES, Toulouse | |
| 17:00 – 17:30 | Roundtable discussion chaired by Alessandra Celletti | |
| 17:30 – 17:45 | Coffee break | |
| 17:45 – 18:15 | OFF-PANEL INTRODUCTION TO TOPIC 2: AI TECHNIQUES IN GUIDANCE CONTROL PROBLEM AND SPACE MISSIONS – Control and Machine LearningEnrique Zuazua – Head of the Chair for Dynamics, Control, Machine Learning and Numerics, University of Erlangen-Nuremberg |
December 14, 2023
Topic 2: AI techniques in guidance control problem and space missions
| 09:00 – 09:20 | Panel coordinator introductionEmmanuel Trélat – Director of the Jacques-Louis Lions Laboratory, Sorbonne University, France | |
| 09:20 – 09:50 | Optimal Control and Reinforcement LearningMichele Palladino – Assistant Professor (Rtd-B) Department of Information Engineering, Computer Science and Mathematics, Università degli studi dell’Aquila | |
| 09:50 – 10:20 | AI-enabled Guidance and Control applications at the European Space AgencyValentin Preda – Guidance, Navigation and Control System Engineer, ESA | |
| 10:20 – 10:30 | Coffee break | |
| 10:30 – 11:00 | AI techniques in guidance control problem and space missionsJoël Amalric – Thales Alenia Space | |
| 11:00 – 11:30 | Artificial Intelligence Algorithm for Space MissionsArturo Intelisano – Director Research and Innovation and Advanced Projects, Thales Alenia Space Italia | |
| 11:30 – 12:00 | On no-regret proceduresSylvain Sorin – Professor of Mathematics, Sorbonne University, France | |
| 12:00 – 12:30 | On the Hegselmann-Krause model in presence of time delaysElisa Continelli – PhD student Department of Mathematics, Università degli studi dell’Aquila | |
| 12:30 – 13:00 | Roundtable discussion chaired by Emmanuel Trélat | |
| 13:00 | Lunch |
Topic 3: Optimization techniques for constellations with applications in space operations
| 14:00 – 14:20 | Panel coordinator introductionMauro Pontani – Associate Professor of Aerospace Engineering, Department of Astronautical, Electrical, and Energy Engineering, Università Sapienza Roma | |
| 14:20 – 14:50 | The ERC-Funded EXTREMA Project: Achieving Self-Driving Interplanetary CubeSatsFrancesco Topputo – Professor of Department of Aerospace Science and Technology, Politecnico di Milano | |
| 14:50 – 15:20 | Distributed Optimization for Integer Programming Problems with application to Scheduling for Earth Observation Missions using Satellite ConstellationsVincenzo Basco – CTO R&T&D Associate, Thales Alenia Space | |
| 15:20 – 15:50 | In-orbit servicing and assisted orbit transfer mission planningGiorgio Fasano – Researcher and practitioner – CTO Associate, Thales Alenia Space | |
| 15:50 – 16:20 | Roundtable discussion chaired by Mauro Pontani | |
| 16:20 – 16:30 | Coffee break |
Topic 4: Multi-stage control problems for launcher and landing problems
| 16:30 – 16:50 | Panel coordinator introductionGiorgio Fasano – Researcher and practitioner, Thales Alenia Space | |
| 16:50 – 17:20 | B-plane targeting optimization method for Moon injection, descent and landing trajectories designAndrea D’Ottavio – Mission Analysis & Operation Engineer, Thales Alenia Space | |
| 17:20 – 17:50 | On-line ‘emergency’ trajectory re-targeting for the landing of a re-usable vehicleEric Bourgeois – Launcher Trajectory, Guidance & Navigation Expert at CNES | |
| 17:50 – 18:20 | The moon lander optimal control problem revisitedFilippo Gazzola – Professor of Mathematics, Politecnico Milano | |
| 18:20 – 18:50 | Constrained optimization in launch trajectories: analytical derivations for ascent dynamics and near-optimal terminal guidancePaolo Teofilatto – Dean of the School of Aerospace Engineering of Sapienza-University of Rome | |
| 18:50 – 19:20 | Roundtable discussion chaired by Giorgio Fasano |
December 15, 2023
Topic 5: Optimal control problems in presence of uncertain parameters
Topic 6: Improved sufficient and necessary conditions in optimal control problems for aerospace problems
| 14:00 – 14:20 | Panel coordinator introductionPiermarco Cannarsa – Professor of mathematical analysis, Università di Roma Tor Vergata | |
| 14:20 – 14:50 | Feedback Control of Astrodynamics Systems Using Solutions of the Hamilton-Jacobi-Bellman EquationBruce Conway – Professor of Aeronautical & Astronautical Engineering, University of Illinois at Urbana Champaign, IL, U.S.A. | |
| 14:50 – 15:20 | Optimal control for the moon lander: a minimum time problemElsa Maria Marchini – Professor of Mathematics, Politecnico di Milano | |
| 15:20 – 15:50 | Second-order sufficient conditions for weak local minima in an optimal control problem with a general control constraintHelene Frankowska – Emeritus Research Director C.N.R.S. Sorbonne University, France | |
| 15:50 – 16:20 | Extended Necessary Conditions for Multi-arc Optimal Control Problems and Application to Spacecraft TrajectoriesMauro Pontani – Associate Professor of Aerospace Engineering, Department of Astronautical, Electrical, and Energy Engineering, Università Sapienza Roma | |
| 16:20 – 16:50 | Roundtable discussion chaired by Piermarco Cannarsa | |
| 16:50 – 17:00 | Coffee break | |
| 17:00 – 17:30 | Closing speech Deep digital technologies and impacts on future of computingCarlo Cavazzoni – Senior Vice President Cloud Computing, Leonardo SpA; Chair of the Industrial Advisory Board, Centro Nazionale di Ricerca in High Performance Computing, Big Data e Quantum Computing | |
| 17:30 – 18:00 | Closing speechDavid Sadek – Vice President Research, Technology & Innovation, Thales Alenia Space |
Scientific Committee
- Piermarco Cannarsa, Università di Roma Tor Vergata
- Alessandra Celletti, Università di Roma Tor Vergata
- Giorgio Fasano, Thales Alenia Space
- Nicola Guglielmi, Gran Sasso Science Institute
- Leonardo Mazzini, Thales Alenia Space
- Mauro Pontani, Università Sapienza Roma
- Emmanuel Trélat, Sorbonne University
Organizing Committee
- Leonardo Mazzini, Thales Alenia Space
- Cristian Mendico, Università di Roma Tor Vergata
- Alessandro Pajewski, Gran Sasso Tech
- Amalia Scaricamazza, Gran Sasso Tech
Need directions? Find how to reach the conference
The conference will take place at the
Auditorium GSSI, in the Rectorate Building – Via Michele Jacobucci, 2, L’Aquila
To reach L’Aquila from Rome Airports
From Rome Fiumicino and Rome Ciampino airports there are direct buses that take about 2 hours operated by Gaspari or FlixBus.
From Fiumicino the Gaspari and FlixBus company buses leave from outside of Terminal 3 Arrivals and arrive at Hotel Amiternum bus stop in L’Aquila. From there you can take any bus going towards the city centre and get off at Collemaggio Terminal Bus. Also taxi cabs are normally available at Hotel Amiternum. You can also call the radio-taxi company (+39 0862 25165 – www.radiotaxilaquila.it). Walking is not recommended, it is about 4 km. away.
From Ciampino the buses leave from the parking area outside the Departures Terminal and arrive at Hotel Amiternum bus stop in L’Aquila. From there you can take any bus going towards the city centre and get off at Collemaggio Terminal Bus. Also taxi cabs are normally available at Hotel Amiternum. You can also call the radio-taxi company (+39 0862 25165 – www.radiotaxilaquila.it). Walking is not recommended, it is about 4 km. away.
To reach L’Aquila by car
From Rome: Motorway A-24 Est.
From the Adriatic A-14 Motorway: exit Teramo-Giulianova → Motorway A-24 direction L’Aquila.
From Pescara: Motorway A-25 Pescara-Popoli → SS17 Bussi – L’Aquila.
From Napoli: A1 nord → SS82 Ceprano-Sora-Avezzano → A24/25 Avezzano – L’Aquila.
To reach L’Aquila by train
We do not recommend using trains to reach L’Aquila as a final destination. If travelling by train we advise using FrecciaRossa or Italo fast trains to Rome Tiburtina Station and take a bus to L’Aquila from there. The journey takes one and a half hours.
To reach L’Aquila from Rome Tiburtina Train/Bus Station
The Tibus Bus Station is located right in front of the main exit of Tiburtina train station.
The following companies provide daily direct bus services from Tiburtina Bus Station to L’Aquila:
TUA Regional transport company
Gaspay company
FlixBus company
Tickets can be bought at the ticket office at the bus station near the arrivals or online at the company websites (recommended option). The price of a one-way ticket can vary from €11 to €15.
Departures are shown on the displays in the stations. The journey takes one and a half hours.
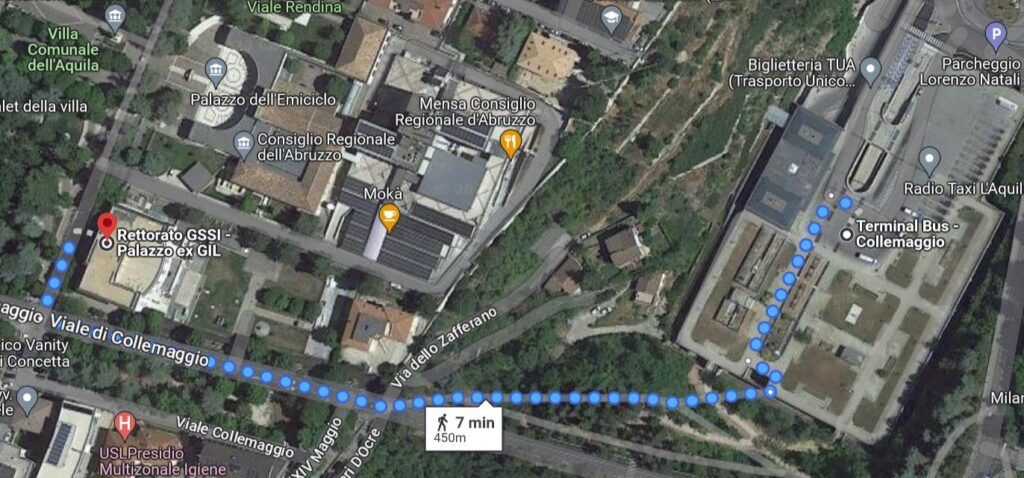
TUA buses’ final stop in L’Aquila is the “Collemaggio” Bus Terminal. From there, in a 600 m walk you can reach GSSI (see instructions below).
Gaspari and FlixBus buses stop at Hotel Amiternum. From there you can take any bus going towards the city centre and get off at Collemaggio Terminal Bus. Also taxi cabs are normally available at Hotel Amiternum.
You can also call radio-taxi company (+39 0862 25165 – www.radiotaxilaquila.it).
Walking is not recommended, it is about 4 km. away.
Tiburtina station can be reached by:
- subway line B from Termini station in the direction of Rebibbia
- regional train to Fara Sabina / Orte from Fiumicino airport
- bus to Termini station and then subwa from Ciampino airport.
To reach L’Aquila from Pescara Airport
Travel by bus 8 or 38 from Pescara Airport to the FS Station Pescara Centrale – P.le della Repubblica. From there, take a regional bus, operated by TUA company. Timetables and fares are available here.
How to reach GSSI Auditorium from Collemaggio Bus Terminal
- Walk (approx. 7 minutes – see map below)
- Buses (Lines Navetta Centro or 6S- always ask the driver for confirmation)
- Taxi